What are isochrones?
- Francis
- janvier 19, 2026
Principle:
An isochronous line is the representation of phenomena known as “isochrones,” i.e., phenomena that have the same time duration.
In maritime routing, isochrones are lines connecting the different distances that can be traveled during a defined period of time, the “step” of the isochrones, in a geographical space — for us, the Earth — based on the polar target speeds of a sailboat.
To connect point A (start) to point B (arrival), the routing will therefore use the speed polar curve and relate it, through iterative calculation, to the average wind data (speed and direction) and current data (speed and direction), taking into account constraints, and multiplying the isochrones along the theoretical route connecting A to B.
How does it work?
The routing algorithm will scan a predetermined search angle, from 180° up to 360°, around the route and proceed with an iteration by calculating a large number of possible routes — this number depends on the search angle/angle step — on the time step defining the isochrones.
Definitions:
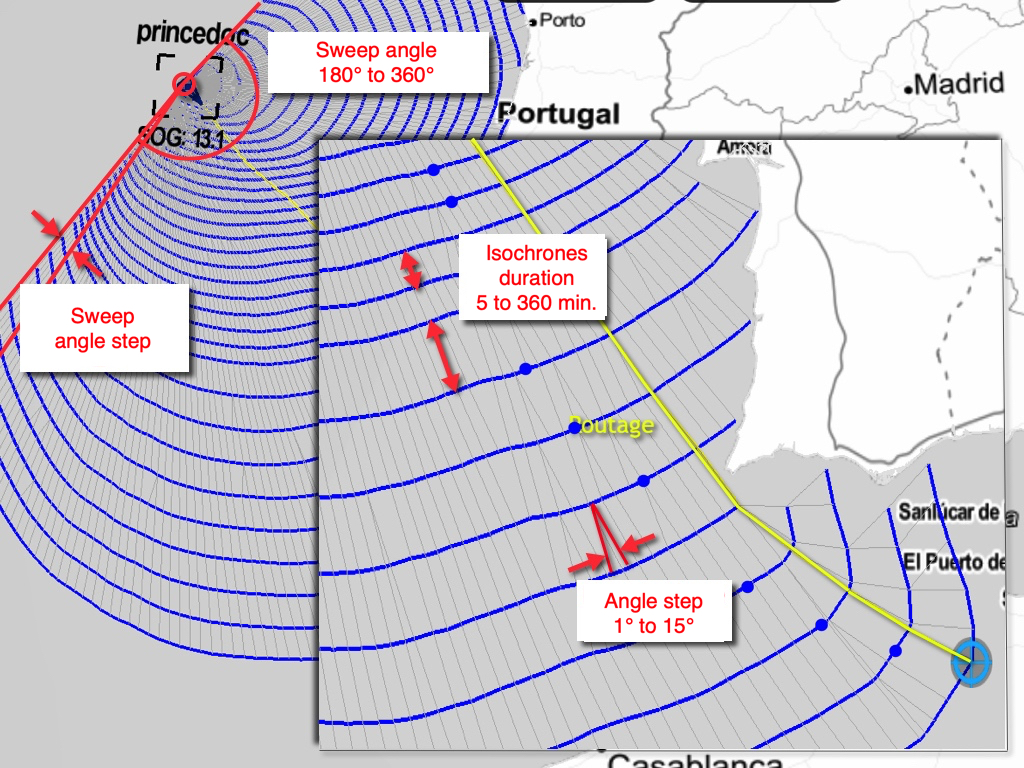
- Sweep angle (or search angle)
From 180° up to 360°, this is the opening angle of the geographical search field in which the isochrones will develop. The default setting is 240°. The chosen opening must take into account the geographical environment of the direct route to the destination point (position of the coastline bordering the route, passage through islands, aso). If the angle is to much open, it may cause divergent routing, too closed the routing may not be able to develop.
- Angle step
Angular steps in the search angle range, from 1° to 15°, default 2°. This is the calculation angle from each point selected on each isochrone. With a search angle of 240° and an angular step of 2°, 120 routes will be calculated from each point selected on each isochrone. The smaller the angle, the more computing power is required.
- Isochrone duration
This is the time between two isochrones. From “auto” by default, up to 360 minutes in 5-minute increments. It must be set according to the distance to be traveled, because the shorter the time step, the greater the accuracy, but the more computing power is required. The “auto” mode lets the program choose the time step based on the length of the leg.
From each isochrone point, the calculation is restarted until the next isochrone and so on until an “optimal path” from the starting point to the destination is obtained.
- Pivot point
On each isochrone, a blue dot shows the shortest distance to the destination. One of these points can be used as a “pivot point” to refine/correct the routing.
Other settings can be used by the developer to fine-tune their routing algorithms for performance optimization.